为了开发一个跟随机器人,我使用了华硕 Xtion 和 OpenNI。为了获得 RGB 图像和骨架关节,我使用了骨架跟踪器脚本 ( https://github.com/Chaos84/skeleton_tracker )。Tracker 在“/tf”中发布关节但问题是我不能在我的脚本中使用这些关节坐标。我不知道如何访问它们。如何在我的脚本中访问和使用它们以使机器人根据这些坐标移动?谢谢。
问问题
1230 次
2 回答
0
您可以使用另一个骨架检测/跟踪器 BodySkeletonTracker:
https://github.com/derzu/BodySkeletonTracker
看看它是如何工作的:
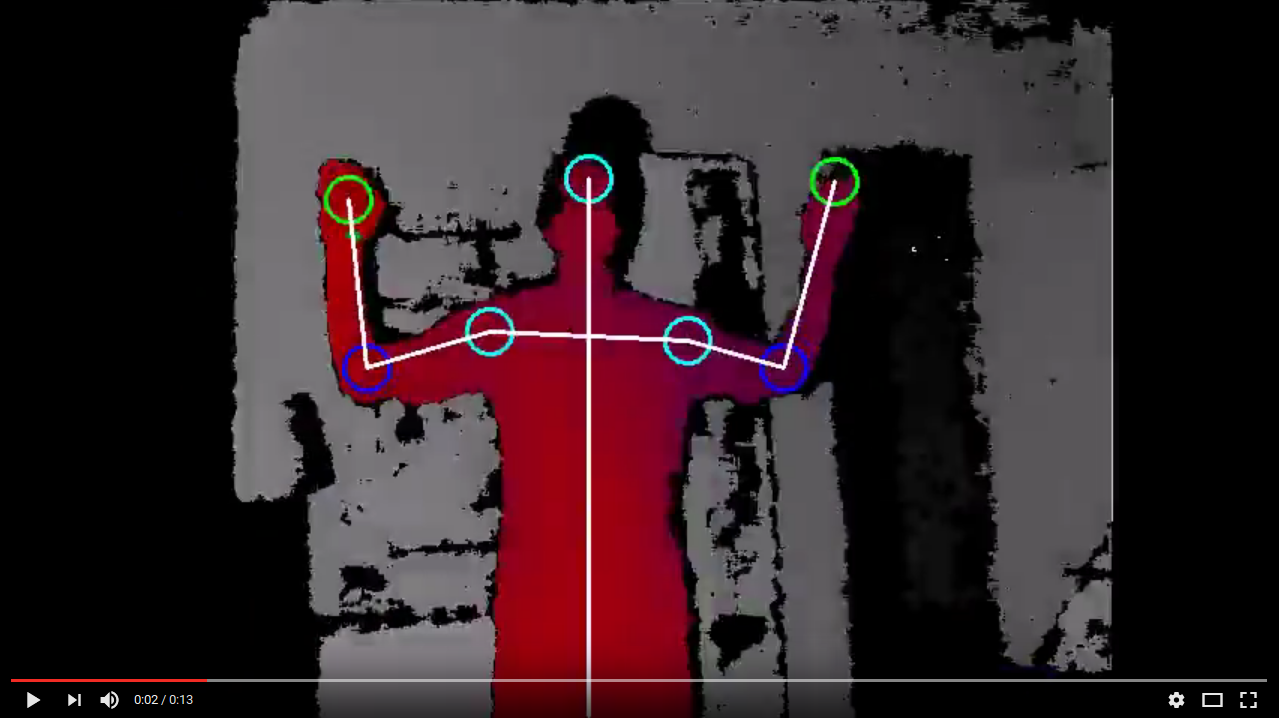
您可以获得关节点,以获得 SkeletonPoints 类的对象。
于 2017-08-04T14:56:58.410 回答