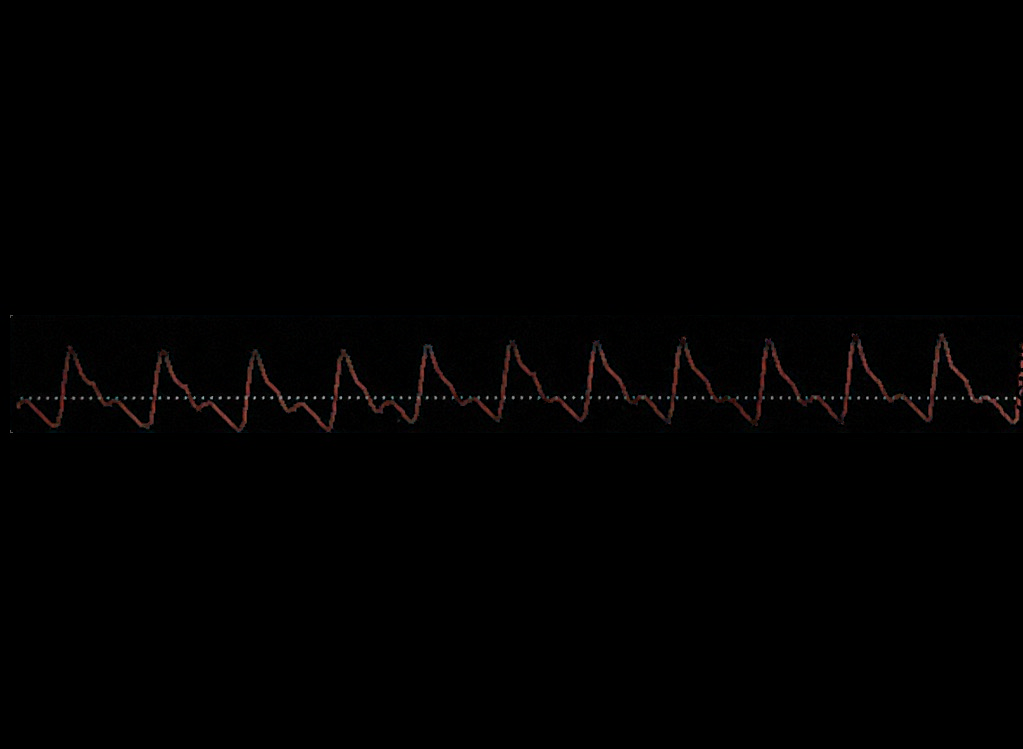
我正在使用 openCV 为 iOS 开发一个应用程序,它从监视器中拍照并提取曲线,但是当图像在阈值处理后有一些明亮区域时,我没有得到完整的曲线,而是一些黑色区域
original = [MAOpenCV cvMatGrayFromUIImage:_sourceImage];
cv::threshold(original, original, 70, 255, CV_THRESH_BINARY | CV_THRESH_OTSU);
findContours(original, contours, hierarchy,CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE );
cv::Mat skel(original.size(), CV_8UC1, cv::Scalar(0));
int idx = 0;
for(; idx >= 0; idx = hierarchy[idx][0])
{
if (contours[idx].size()>250 && idx>-1){
cv::Scalar color( 255,255,255);
drawContours(skel, contours, idx, color, CV_FILLED, 8, hierarchy);
}
}
cv::threshold(skel, skel, 100, 255, CV_THRESH_BINARY_INV);
cv::erode(skel,skel,cv::Mat(),cv::Point(-1,-1),2);
那么当图像有一些像示例这样的明亮区域时,我如何处理图像以提取曲线

{kind=link}
{kind=link}
{kind=link}